HOROWITZ GROUP
The Mechanics Servo Laboratory focuses on the use of Micro Electro Mechanical Systems (MEMS) and advanced control synthesis tools to enhance the performance of computer disk drives and other other mechatronic devices. Some of the currently undergoing projects are listed below.
Algorithms for Robust Performance Control Design
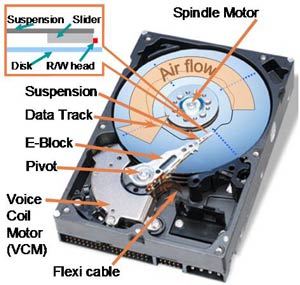
On a hard disk drive (HDD), information is stored on data tracks, which are nominally arranged as a set of concentric circles on the disk. Data is accessed by positioning a magnetic read/write head over the corresponding data track as the disk spins at constant angular velocity. One relevant control problem is the "track following" control problem, in which the position of the read/write head must be maintained over a single data track for an extended period of time. The closed loop position error should be less than 2.3nm to meet the current current goal of the magnetic recording industry (storage density of 4 terabits/in2, with a track width of 23nm).
Several factors make it difficult to achieve the required level of nano-scale performance. These include disturbances present in the system (periodic, non-periodic and measurement noise). Moreover, since there tends to be large variations in HDD dynamics due to variations in manufacture and assembly, the controller must guarantee the desired level of performance for a large set of HDDs. In addition, the angular velocity of the disk during operation and the locations of the servo sectors are fixed and the position error can only be sampled at a fixed, pre-specified rate. This in turn prevents the controller from detecting and controlling high-frequency resonance modes in the HDD.
There are several challenges to designing a controller for a dual-stage multi-sensing HDD. First, since we have multiple sensors and actuators, we must design multi-input multi-output (MIMO) controllers. Second, since the additional sensor signals are sampled at a higher rate than the fixed PES sampling rate, we must control a system which is linear periodically time-varying (LPTV). In particular, this means that frequency domain analysis techniques do not hold. Thus, we are interested in finding fast and reliable methods of designing MIMO controllers for LPTV systems which guarantee a high level of robust performance over all modeled uncertainty. The current approaches to solving this control design problem all use an iteration of convex optimizations to design a controller. Although there are numerical solvers which are guaranteed to quickly find the global optimum for each of these problems, they are prone to numerical problems and tend to require a lot of computation due to the number of variables that are being optimized.
Recently, we have discovered that a number of these optimization problems have special structure which allows them to be solved using Riccati equation solutions (i.e. using eigenvalue decompositions). For instance, one relevant problem is to determine a bound on the worst-case performance of a given closed-loop system. We have shown that an algorithm based on Riccati equation solutions is much faster and more reliably accurate than the mathematically equivalent convex optimization alternative [1]. We have also used Riccati equation solutions to reduce the amount of computation required to design a HDD controller from 4 hours (using the iteration of convex optimizations in [2]) to 16 seconds. Moreover, although both algorithms achieved similar accuracy, the convex optimization approach required multiple attempts to find an initial condition which yielded a high-performance controller whereas the Riccati equation approach worked correctly on the first try.
- Conway, R., and Horowitz, R., 2009. Analysis of discrete-time H2 guaranteed cost performance. In Proceedings of the DSCC 2009.
- Conway, R., and Horowitz, R., 2010. Guaranteed cost control for linear periodically time-varying systems with structured uncertainty and a generalized H2 objective. Mechatronics, 20(1), February, pp. 12-19.
Student: Richard Conway
Piezoelectric MEMS Microactuator
In recent years, the cost of hard disk drives has continued to decline while track density and storage capacity have rapidly increased. The reduction in track density has led to a need for nanopositioning of the read-write head at frequencies above the conventional servo bandwidth. This presents a challenging set of constraints for low per-unit cost hardware improvement which is most readily met by a second-stage head-based microactuator manufactured through wafer-level fabrication prior to read-write element fabrication.
Research is being conducted with a variety of piezoelectric and electrostrictive materials which can generate the required bandwidth and force without excessive actuation voltages. Various prototype actuators are being fabricated in the Berkeley Microfabrication Laboratory and the Marvell Nanofabrication Laboratory in order to demonstrate the performance benefits of piezoelectric head-based microactuators.
Students : Josiah Wernow
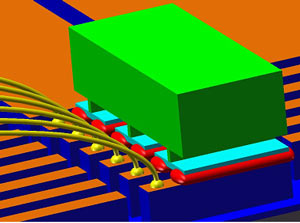 Prototype Piezoelectric Microactuator
Prototype Piezoelectric MicroactuatorMicro Rate Integrating Gyroscope Control Design and Implementation
Mems gyroscopes are vibratory type mechanical gyroscopes, having a mechanical resonator that vibrates in a plane and the normal to the plane defines the axis of rotation of the gyroscope. These are structures that are built on polysilicon or crystaline silicon substrates using standard semiconductor fabrication technology. The principle behind the working of a gyroscope is popularly known as 'gyroscope effect' and hence the name for the device. The vibrating mass is set initially to oscillate along a line and as the base rotates; the inertia of the vibrating mass holds back the line of vibration with respect to the inertial frame of reference (X-Y coordinate frame) and hence in the gyro's frame of reference (x-y) the line of vibration precesses. It is this precession of the line of vibration, as seen from the (x-y) frame that enables us to measure the angle of rotation of the rotating base. In practice, such an ideal device is difficult to build because of manufacturing imperfections and environmental factors which induces frequency mismatches between the two modes, quadrature terms (non diagonal stiffness terms), damping terms (both diagonal and non-diagonal). These imperfections degrade the performance and cause a false output. This project focuses on developing control strategies using suitable modern control techniques like adaptive control, iterative learning control etc in the presence of noisy measurements so that the device behaves like an ideal gyroscope. The challenge lies in the convergence of the measured rotation rate as quickly as possible to the input rotation rate without much control effort. Some of the factors that makes the problem challenging are the magnitude of the non-uniformities and the sensitivity of these parameters to temperature variations. Hence it’s necessary to learn the non-uniformities and compensate them in such a way that the measured output rate converges to the input precession rate to measurable accuracy without exceeding the available control effort.
Conventional control algorithms based on amplitude control and quadrature control deliver good performance only when the non-uniformities are significantly smaller in magnitude and convergence have been proven in the asymptotic limit. Our challenge lies in dealing with relatively larger non-uniformities and we have been able to show reasonable performance when the aforementioned non-uniformities are time invariant and the motion is rich enough to expose all the non-uniformities, usually referred to as persistence of excitation.
The current focus is on achieving quick output precession rate convergence without expending much control during the transient phase which has been our major concern. Also, we are looking at the case where the input precession rate is time varying. Future work will involve modeling noise, parameter dependence on temperature variations, reducing the sensitivity of the algorithms to such disturbances and discrete time implementation of the algorithms.
Student: Deepan Raj Prabakar Muthirayan
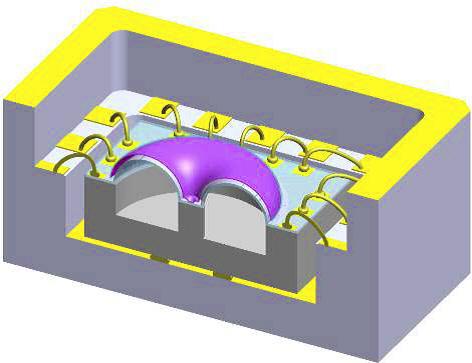 Proposed Resonator Design
Proposed Resonator Design
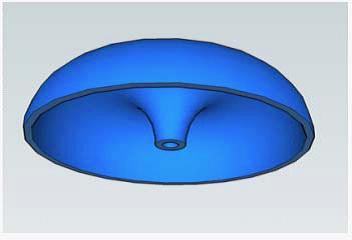
Resonator Model
Track-Following Control Design in Dual-Stage Servos with Bit-Patterned Media
Design and implementation of controllers that keep the closed-loop control effort and position error signal (PES) with respect to a predetermined track location small over a set of HDDs
Student: Behrooz Shahsavari
Feedforward Methods for External Vibration Compensation
Hard disk drive is always cotaminated by many kinds of disturbances. One of them is external disturbance vibration caused by speakers. This kind of disturbance has higher frequncy than that can be compensated by traditional feedback controllers. Instead, we proposed a feedforward compensation methods using auxiliary vibration sensors like accelerometers. There are three kinds of control methodology we are inspecting: Optimal Control, Wienner Filter and Lattice Filter.