HOROWITZ GROUP
The Transportation Systems Control Laboratory focuses on the development of traffic management techniques that utilize concepts in control and estimation theory in order to make more efficient use of existing freeway corridors, and to reduce congestion during commute periods. The research has benefited from the support of California Department of Transportation (Caltrans). We are a part of the TOPL (http://path.berkeley.edu/topl) project where we collaborate with researchers in Partners for Advanced Transit and Highways (PATH) and the electrical engineering department at UC Berkeley.
TOPL Freeway modeler
The TOPL Freeway Modeller (TOPL-FM), provides several functions that facilitate the construction and calibration of cell-based models of freeways. Although its principal source of data is the PeMS database (pems.eecs.berkeley.edu), it also supports the use of data from other sources, such as manual counts. The user interacts with the program through two interfaces. The first is a graphical user interface, which acts as a control panel for launching the different components of the program. The second is an Excel spreadsheet named the configuration file, where the user can modify any of the parameters involved in the model construction and calibration process.
TOPL-FM guides the user through a clearly defined sequence of steps leading from data collection, through calibration, to simulation. The final outcome of the process is an input file containing a calibrated model of the freeway which can be loaded into the AURORA simulator. AURORA is a separate TOPL tool for testing the performance of the network under different environmental and control scenarios. The step-by-step process formalized in TOPL-FM is as follows.
- Define the test site. The starting point for the process is to pick a freeway, a direction, and limiting absolute post miles.
- Assess the state of the loop detector infrastructure.This step involves a historical analysis of PeMS' detector health status.
- Select a set of days on which to base the calibration of the freeway.The historical analysis helps the user to find days with reliable data. TOPL-FM helps the user to manage the large amounts of data needed to assemble the demand profiles.
- Partition the freeway into segments or cells.TOPL-FM suggests a partition based on PeMS' configuration data, and allows the user to make adjustments.
- Calibrate the parameters of the traffic model.These are the capacity, free flow speed, jam density, and congestion wave speed for each freeway segment. TOPL-FM includes a fundamental diagram data fitting routine which computes these parameters for each cell.
- Impute flows for unmeasured onramps and offramps.On the analyzed site there often are unmeasured ramps and/or ramps with faulty detectors. The flow on these ramps must be estimated in order to create a complete picture of the demand. The program includes a ramp imputation algorithm based on concepts of adaptive learning.
- Simulate and compare with the measured data.The quality of the calibrated model is determined by comparing the output of the simulation with the measured data. This comparison is made by TOPL-FM in terms of performance measures, such as travel time, delay, and productivity, that are also provided by PeMS.
- Export simulation files. Freeway configuration files and demand profiles are exported for simulation in different sofware tools. This includes Aurora / Freeway modeller. See TOPL site for more details.
With the above steps, TOPL-FM serves as an semi-automated tool for creation of freeway traffic flow models that replicate observed traffic flow behavior. The entire process of creating a model for any particular freeway will take around two weeks. This is a huge improvement over existing procedures for microscopic traffic flow models, which can take anywhere between six months to a year. Various algorithms currently investigated as a part of the freeway modeling project are incorporated into this tool. Currently, algorithms are being developed for automatic fault detection for identifying faulty measurement data.
Students : Gunes Dervisoglu and Ajith Muralidharan.
- Muralidharan, A., Dervisoglu, G. and Horowitz R., Freeway Traffic Flow Simulation Using The Link Node Cell Transmission ModelAmerican Control Conference, 2009
- Dervisoglu, G. et.al, Automatic Calibration of the Fundamental Diagram and Empirical Observations on Capacity88 TRB annual meeting, Jan 2009
 User Interface for TOPL-FM
User Interface for TOPL-FM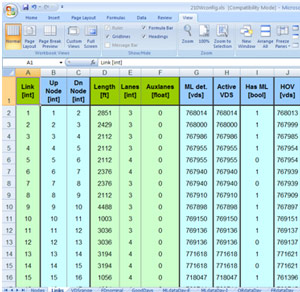 Configuration file.
Configuration file.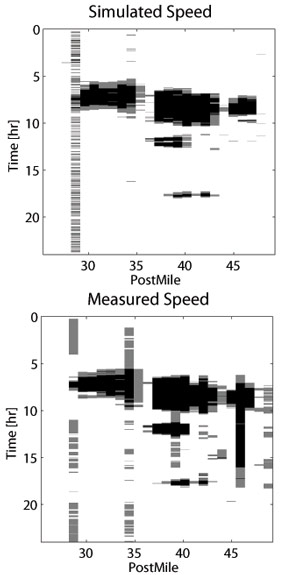 Simulated velocity contours compared to measurements.
Simulated velocity contours compared to measurements.Estimation of ramp flows for freeway traffic simulations.
Macroscopic simulation of traffic in freeways is useful for performing simulation studies pertaining operations planning and management of freeways. Models are typically calibrated to represent the traffic dynamics on a chosen day as observed from available velocity and flow measurements. Calibration of the models involve estimating common traffic parameters (i.e the free-flow speed, segment capacity/maximum flow and the congestion wave speed), using data obtained from detectors located along the freeway. In addition, the model requires the user to specify on-ramp entry flows and off-ramp exit splits (which represent the proportion of vehicles exiting using a given off-ramp). In most cases, detectors measurements are not available for ramps, which makes it important for us to estimate these flows to properly specify the model.
In TOPL, we employ a model based imputation algorithm, which tries to estimate the on-ramp flows and off-ramp splits, which can be used in the model to simulate traffic that matches the observed measurements along the freeway. Initially, we developed an imputation algorithm based on the Asymmetric Cell transmission model(CTM), which is a piecewise linear approximation of the general CTM model. The imputation algorithm is based on an adaptive repetitive iterative learning control algorithm which estimates the ramp flows section-wise (where each section consists a freeway segment with atmost one off-ramp and/or one on-ramp) from the most upstream section of the freeway to the most downstream link. The algorithm and its convergence properties are discussed in the paper given below.
We have also developed an Imputation algorithm based on the Link-Node Cell transmission model, which is a more accurate model for representing traffic dynamics in a freeway, especially when ramp flows are appreciable. The LN-CTM is non-linear and this required us to develop new algorithm to ensure that the ramp flow estimator is convergent. In this case, the imputation algorithm uses two steps, where the first step involves an adaptive iterative learning algorithm that matches the model calculated density with the measured freeway density. In this step, we are able to the effective inflows (on-ramp flows minus the off-ramp flows) at any given junction. In the second step, we use a linear program to calculate the ramp flows such that the model calculated flows match the measurements. The algorithm, and its convergence properties are discussed the papers referenced below.
Students : Ajith Muralidharan.
- A. Muralidharan and R. Horowitz, 'Imputation of ramp flow data using the asymmetric cell transmission model', ASME DSCC 2009.
- A. Muralidharan and R. Horowitz, 'Imputation of Ramp flow data for freeway traffic Simulations', TRR- Journal of the TRB 09.
- A. Muralidharan and R. Horowitz, 'Analysis of an adaptive iterative learning algorithm for freeway ramp flow imputation.', ASME DSCC 2011.
Optimal control of freeway traffic using the Link Node Cell Transmission model.
We have designed optimal controllers that manage freeway traffic congestion using a combination of ramp metering (restricting the on-ramp flows by storing and releasing vehicles) and speed limit control. We use the Link-Node Cell transmission model to describe the traffic dynamics in the optimal control framework. The optimal controller seeks to specify the ramp metering profiles and the speed limits that minimize the total delay experienced by all the vehicles using the freeway. The optimization problem corresponding to the optimal control problem based on the LN-CTM is non-convex and non-linear. For usually used time horizons, the problem involves a large number of variables, and the solution process becomes extremely slow. Moreover, the solution obtained cannot be guaranteed to be a global minimum. We relax the problem to a linear optimization problem, and propose an approach to map the solution of the linear optimization algorithm to the solution of the original optimal control problem. These large-scale linear programs can be solved very efficiently, and they generate guaranteed global minimum solution. We prove that the solution derived from this approach is optimal for the original optimal control algorithm. We discuss the algorithm and its application in paper referenced below
Students : Ajith Muralidharan.
- A. Muralidharan and R. Horowitz, 'Optimal control of freeway networks based on the Link Node CTM', Accepted for the American Control Conference, 2012.
Model Based Fault Detection of Freeway Traffic Sensors
One of the major difficulties encountered during the model calibration process outlined above in the description of the TOPL Freeway Modeler, is the health of mainline data being measured on the freeway mainlines. Since most ramp flow data is unavailable and is estimated based on mainline data, it becomes even more important to detect which mainline data are not healthy. The detection of faulty measurements had long been the most time- consuming part of the calibration process since it remained mostly non-automated. The automation of this task decreased the model calibration time significanty.
We devised a Cell Transmission Model-based fault detection algorithm that focuses on automatically flagging detectors that measure biased flows and/or densities at a given sensing station on a freeway. The reason the main focus is on measurement bias is the fact that statistical irregularities are already being detected by the PeMS repository that processes and archives traffic data on California freeways. The algorithm picks out detectors that do not comply with the neighboring detectors when superimposed with the Cell Transmission Model. Once the faulty detectors are determined, fault handling is accomplished by exclusion. Removing the bad detectors' data from the calibration process decreases the modeling errors by approximately 40% on average. Usually, around 10% of detectors are found to be faulty in the modeling efforts undertaken thus far.
Students : Gunes Dervisoglu
- G. Dervisoglu and R. Horowitz, 'Model Based Fault Detection of Freeway Traffic Sensors', ASME DSCC 2011.
Hardware-In-The-Loop On-ramp Simulation Tool to Debug and Test the Universal Ramp Metering Software
A hardware-in-the-loop simulation (HILS) system was developed as a tool to assist in testing the Universal Ramp Metering Software (URMS), before implementation in the field. The HILS system replaces the conventional manual testing techinique, where switches are used to simulate loop detector signals. This debugging and testing approach adopted here replicates, in real-time on-ramp/mainline detector signals and hence provides realistic tests of the URMS.
The tool includes a simple car following microscopic traffic model for the on-ramp and a Controller Interface Device (CID), which interfaces a standard personal computer with a 2070 traffic controller. The CID consists of the low cost and commonly available National Instruments (NI) USB-6501 24-Channel Digital I/O device and a basic circuit that interfaces the 5-Volt TTL logic from the Digital I/O board to the 2070 controller. The resulting hardware-in-the-loop simulation tool systematically reads the phase states from the controller and changes detector states based on the cars trajectories as displayed on the on-ramp simulator. With this tool it is possible to check the performance of the 2070 controller running the URMS as if the traffic controller was operating on a standard on-ramp managed by Caltrans.
- R. O. Sanchez, R. Horowitz, and P. Varaiya, "Hardware-In-The-Loop On-Ramp Simulation Tool to Debug and Test the Universal Ramp Metering Software," Proceedings of the 12th IFAC Symposium on Controls in Transportation Systems, Redondo Beach, California, September 2009.
Students : Rene Sanchez
 Interface device between controller and computer
Interface device between controller and computer Labview based testing tool
Labview based testing tool Field Test Implementation of Queue Control
This study was sponsored by the California Department of Transportation as the first stage of a ramp metering with queue control field study. The field test has been proposed in order to implement ramp metering with queue estimation and regulation on the Hegenberger Rd. Loop on-ramp to 880 southbound in the Caltrans Bay Area District to study its effect in minimizing queue and mainline density oscillations and enhancing performance. The field study was designed to be completed in three stages. In the first stage, four different queue estimation methods were evaluated. The use of accurate queue estimation algorithms in freeway on-ramp metering may improve on-ramp storage utilization and reduce queue spillover into the adjacent arterials.
Four different queue estimation methodologies were studied using wireless magnetic sensors installed on a single lane loop on-ramp. Queue length estimation based on (i) occupancy measurements at ramp entrance, (ii) vehicle counts at on-ramp entrance and exit, (iii) speed measurements at ramp entrance, and (iv) vehicle re-identification were considered. These queue estimation methods were evaluated using available raw and processed sensor data, retrieved from the test site through mobile data communication and downloaded from a server. The accuracy and reliability of the queue estimation methods were studied using ground truth data obtained from video.
A major challenge for implementing queue control has been to accurately estimate on-ramp queue lengths, particularly during saturated on-ramp conditions, when the vehicle queue extends around or beyond the ramp entrance. The main outcome of this project was the development and field test verification of an accurate on-ramp queue length estimation algorithm based on vehicle re-identification, which performs reliably even under severe on-ramp saturated conditions.
- R. O. Sanchez, R. Horowitz, and P. Varaiya, "Analysis of Queue Estimation Methods Based on Wireless Magnetic Sensors," accepted for publication at the Transportation Research Record, Journal of the Transportation Research Board, 2011.
Students : Rene Sanchez
 Test site for installation and testing
Test site for installation and testing Sensys detectors installed on the ramp
Sensys detectors installed on the rampVehicle Re-Identification Using Wireless Magnetic Sensors
Vehicle re-identification by matching electromagnetic signatures captured from inductive or magnetic sensors appears as one of the most efficient and cost-effective methods to re-identify vehicles without raising privacy concerns associated with vehicle tracking. However, electromagnetic signature methods tend to be unreliable under congested conditions, when stop and go traffic is present.
For this project, a vehicle re-identification method based on matching vehicle signatures obtained from wireless magnetic sensors was studied on a single lane loop on-ramp. Different modifications were implemented in the algorithm in order to address limitations of the system when vehicles stop/move slowly over the detectors. The original and modified vehicle re-identification algorithm results were compared against ground truth data obtained from video. Based on the ground truth data it was possible to determine the percentage of vehicles that are re-identified and the number of those vehicles that are misidentified as a function of different algorithm parameters. For this analysis, vehicles were divided into two subsets: i) uncongested and ii) congested. The original method mismatched percentage was around or below 15% for the uncongested vehicle subset and between 20% to 60% for the congested one. With the modified method it was possible to improve the matching rate as well as the accuracy of the matching algorithm. For the uncongested subset, the modified method showed a higher vehicle re-identification rate while maintaining the mismatched percentage around or below 8%. The main improvement over the original method was achieved on the congested vehicle subset, since the number of re-identified vehicles was increased over the original method while keeping the mismatched percentage around or below 14%.
- R. O. Sanchez, C. Flores, R. Horowitz, R. Rajagopal, and P. Varaiya, "Vehicle Re-Identification Using Wireless Magnetic Sensors: Algorithm Revision, Modifications and Performance Analysis," in Proceedings of the IEEE International Conference on Vehicular Electronics and Safety, Beijing, China, July 2011..
Students : Rene Sanchez
Arterial Travel Time Estimation Based On Vehicle Re-Identification Using Wireless Magnetic Sensors
Two versions of an arterial travel time estimation method based on vehicle re-identification using wireless magnetic sensors were studied across an arterial segment with multiple intersections. Both methods are based on the same travel time estimation system, but one of them uses the so called original signal processing algorithm while the other one uses a recently modified version of it. Both methods were tested on a 0.51 km (0.32 mile)-long segment of West 34th Street in New York, NY, under harsh driving conditions (i.e. right after a winter storm). The original and modified system results were compared against ground truth data obtained from video. Based on the ground truth data it was possible to determine the travel time distribution and the percentage of vehicles that each of the different methods was able to re-identify. During an analysis period of 45 minutes, 318 vehicles were registered to go across the arterial segment. The original method has a 62% re-identification rate, while the modified method has a 69% rate. Based on comparisons of travel time distribution and empirical cumulative distribution functions, it was observed that the modified method travel time distribution is closely related to the ground truth distribution, while the original method significantly diverges from the ground truth at long travel times.
- R. O. Sanchez, C. Flores, R. Horowitz, R. Rajagopal, and P. Varaiya, "Arterial Travel Time Estimation Based on Vehicle Re-Identification Using Magnetic Sensors: Performance Analysis," in Proceedings of the IEEE ITSC 2011 Conference, Washington, D.C. USA, October 2011..
Students : Rene Sanchez
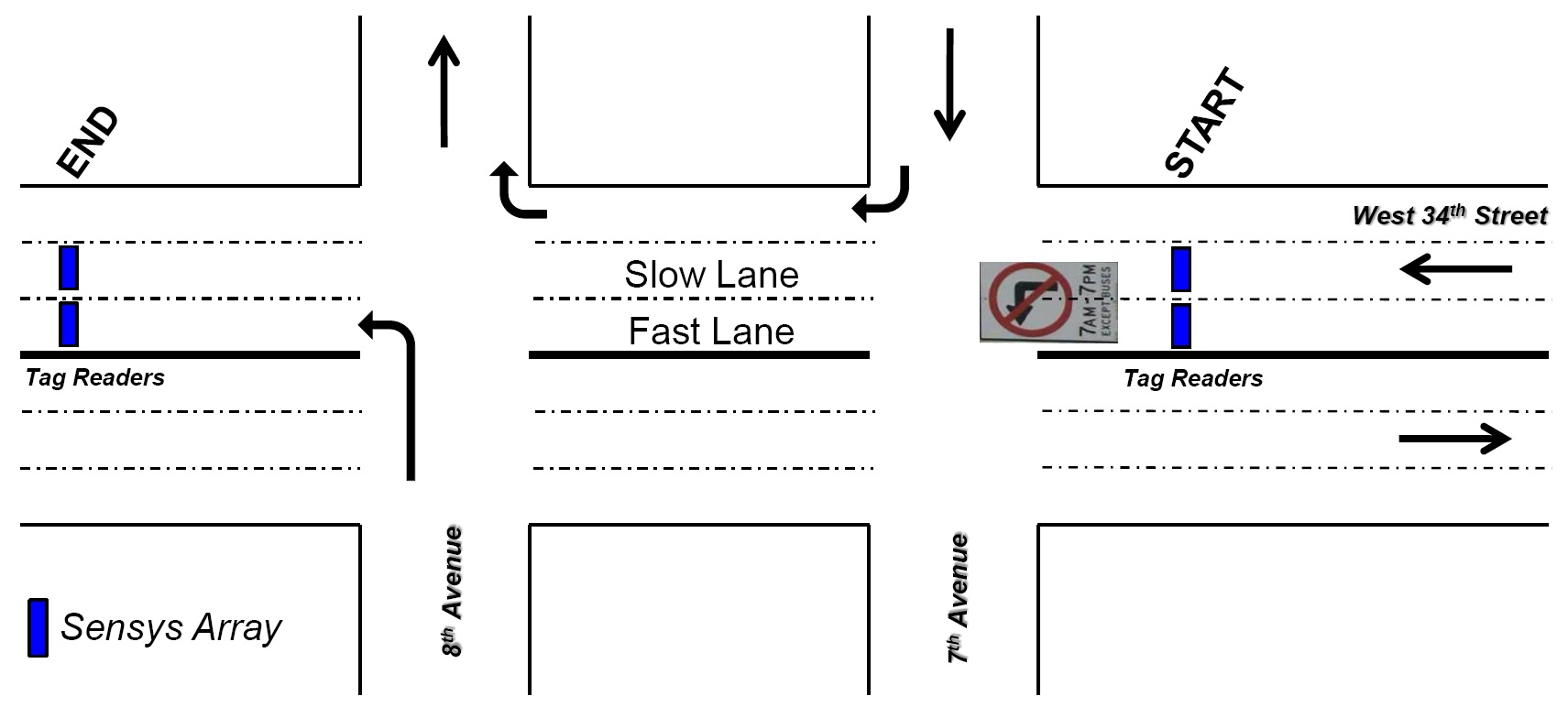 Test Site: 0.32-mile segment of 34th Street in New York City
Test Site: 0.32-mile segment of 34th Street in New York City Traffic control and microsimulation
Microscopic simulation is a way to simulate traffic by modeling the behaviour of individual vehicle. It can be used to evaluate the performance of traffic management methods. Three projects were done or is done using microscopic simulation: 1) variable speed limit control and ramp metering on freeway; 2) Cooperative Adaptive Cruise Control; 3) coordinated control between freeway and arterial.
The first project tried to improve freeway congestion caused by weaving. Weaving is a situation in which vehicles change lanes frequently in a short distance. Some freeways have daily congestion due to weaving near some on-ramps or off-ramps, and this congestion results in huge delay and fuel consumption. In this project, a control strategy using variable speed limit and ramp metering was proposed to increase traffic flow and reduce delay. Microscopic simulation was used to evaluate the benefit of this strategy.
The second project tried to estimate the effect of using Adaptive Cruise Control (ACC) and Cooperative Adaptive Cruise Control (CACC) on freeway traffic flow. ACC and CACC are systems on automobiles to improve driving experience. ACC is based on radar and CACC is based on vehicle-to-vehicle communication. In this project, a microscopic simulation, which was based on some field experiment result from the work of a group in PATH, was built to analyze the impact of ACC or CACC in different market penetration. It showed that CACC can help to increase freeway capacity if its market penetration reached moderate to high percentage.
The third project is going to design a control strategy to coordinate the control on freeway and arterial. Ramp metering on an on-ramp and signal control at the adjacent intersection are usually operated independently. This can sometimes caused queue spillover at on-ramp or insufficient green time for one (or some) movement(s). We try to propose a control method that coordinates ramp metering and signal control to improve traffic performance, and use microscopic simulation to test it.
Students : Dongyan Su
- Dongyan Su, Xiao-yun Lu, Pravin Varaiya, Roberto Horowitz Steven E. Shladover, "Variable Speed Limit and Ramp Metering Design for Congestion Caused by Weaving", 90st Transportation Research Board Annual Meeting, Washington D.C., Jan 23-27. 2011.
- Dongyan Su, Xiao-yun Lu, Pravin Varaiya, Roberto Horowitz Steven E. Shladover, "Variable Speed Limit and Ramp Metering Design for Congestion Caused by Weaving", 90st Transportation Research Board Annual Meeting, Washington D.C., Jan 23-27. 2011.
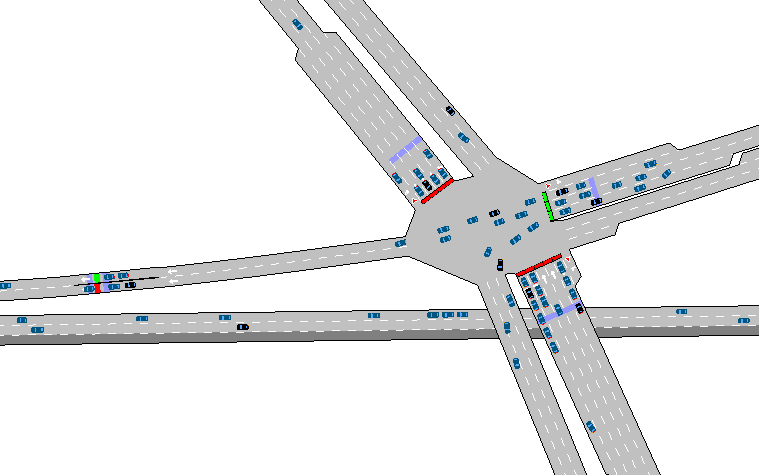 AIMSUM Microsimulation tool
AIMSUM Microsimulation toolSelf-Organizing Algorithms for Controlling Network Feature Map Probability Distributions in Multiple Dimensions
Controller networks with multiple service agents are a common feature of large scale or complex systems. The ideal objective in such a situation is to divide the relatively large uncertain space into a series of smaller spaces that can be served by a single agent or service provider that will function in an optimal manner. Algorithms that generate such a partition and can be updated given additional data have been proposed and shown to converge in a one-dimensional space; however, there has been no conclusive algorithm that has been shown to function in multiple dimensions. Our objective is to determine if such an algorithm exists and given its existence what properties it has.